登录系统
首页
专题直播
活动直播
专题专栏
通知公告
教育资源
同步课堂
国家中小学智慧教育平台
学前教育
比赛实况
政策文件
义务教育
校培监管
实验教学
新高考
志愿库
选科库
院校库
专业库
职业库
教师成长
教师信息
获奖荣誉
教师培训
教师研修网智慧研修平台
教育科研
教科研课题管理
骨干教师
教育技术课题管理
教育技术
实验教学说课评选
科教资源评选
校本德育课程评选
教育技术课题管理
职业教育
技能大赛
比赛实况
业务中心
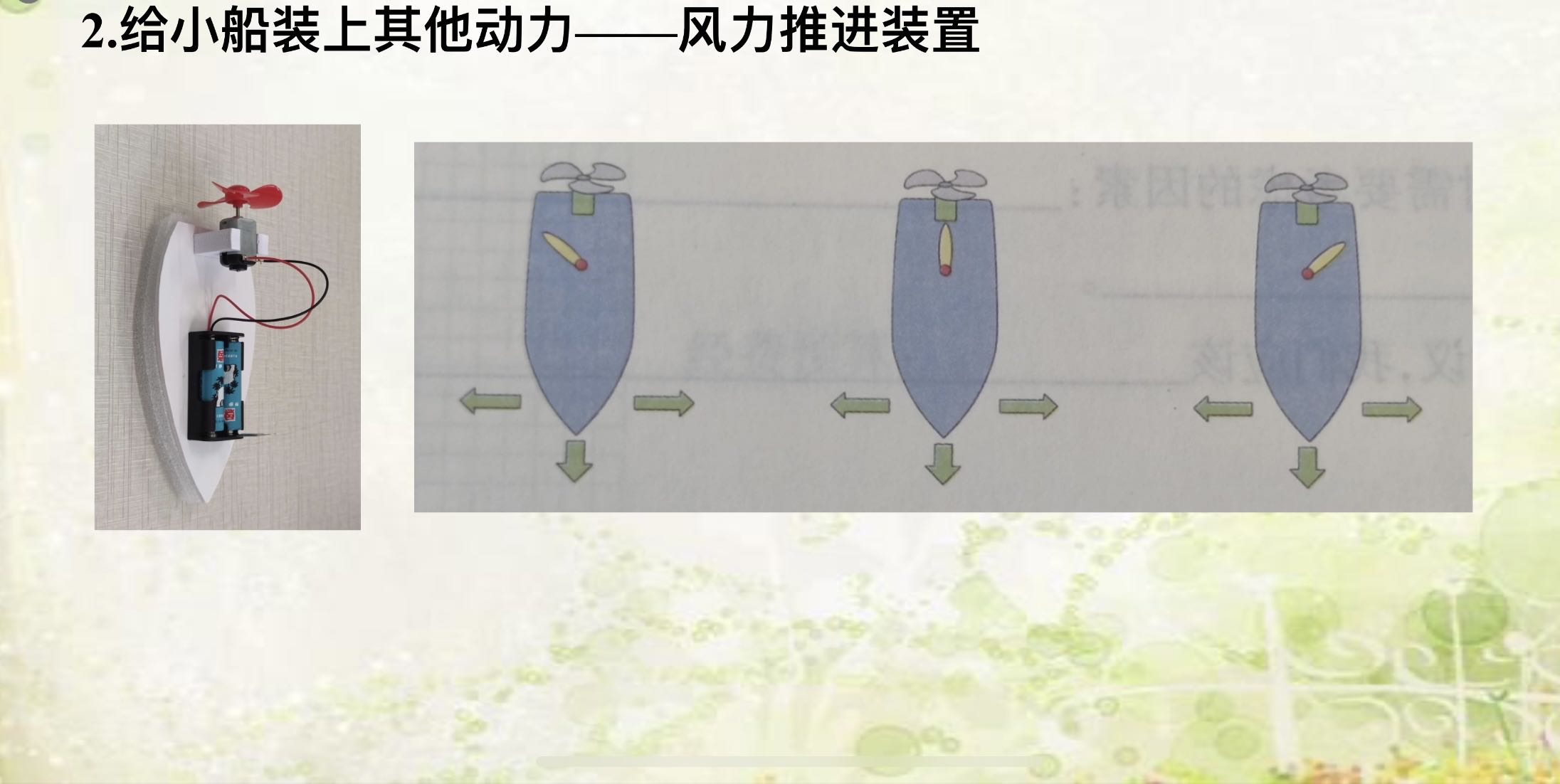
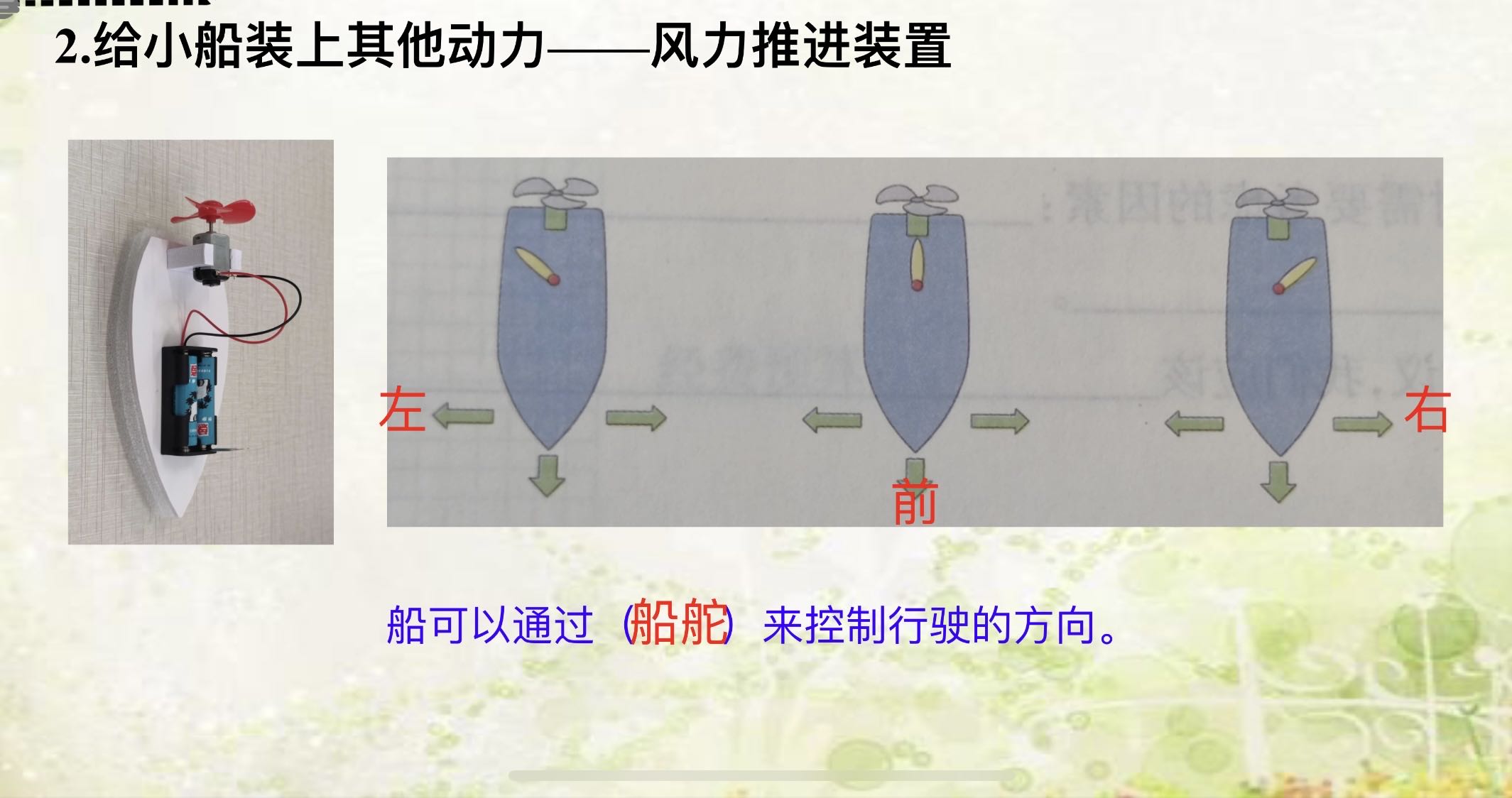
探索控制船行驶的方向
教室前景
教室后景
学生特写
实验登记表
辅导特写
实验现象
学期:
2022-2023学年度下学期
所属范围:
靖边县教育和体育局
所属学校:
靖边县王渠则镇九年制学校
年级科目:
五年级科学
实验目录:
新版下册>自定义目录>新版实验
实验教师:
白慧
实验类型:
演示实验
实验时间:
2023-06-27 16:14